R-TBuilder - расчет траекторий движения роботов-манипуляторов
R-TBuilder – программное обеспечение для автоматического построения траекторий манипуляторов на основе трехмерных моделей обрабатываемых объектов. R-TBuilder позволяет производить вычисление всего множества траекторий, требующегося для обработки объектов, без необходимости ручного или программного описания движения.
Возможности
- Загрузка, просмотр и редактирование библиотеки рабочих поверхностей;
- Гибкая настройка запретных зон и ограничений на движение робота-манипулятора;
- Автоматическое формирование набора оптимальных траекторий перемещения объекта, необходимого для обработки заданной рабочей поверхности;
- Моделирование и предварительный просмотр движений манипулятора с возможностью внесений корректировок.
Особенности
- Модуль R-TBuilder предоставляет возможность унифицированного управления множеством различных манипуляторов в комплексе с периферийными устройствами для выполнения одной задачи.
- Использование модуля не требует программирования, что обеспечивает возможность получения быстрого результата и возможности внесения изменений в поведение манипулятора в процессе выполнения текущей задачи.
Как работает R-TBuilder
Для автоматического построения траекторий используются следующие входные данные:
- Файлы STL-формата, содержащие информацию о полигональных сетках обрабатываемых поверхностей и запретных зон движения манипулятора;
- Информацию о конфигурации манипулятора;
- Информацию о позиции манипулятора относительно объекта.
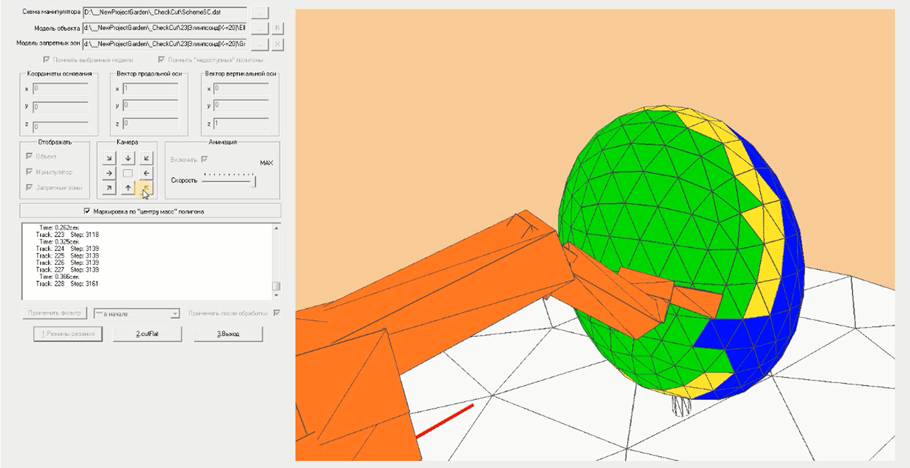
Формы полигональных сеток произвольны и могут формироваться с помощью любого генератора форм, который использует STL в качестве формата генерируемых данных. Результатом выполнения являются 6-мерные массивы углов траекторий, которые транслируются в управляющие команды манипулятора. У пользователя есть возможность просмотра и редактирования модели выполнения до запуска задания.